





Con l’utilizzo della mungitura automatica, passando dal TMR al PMR, il modo di alimentare le bovine cambia radicalmente e spesso i punti di vista dei nutrizionisti non sono omogenei. Abbiamo più volte affrontato questo argomento sulle pagine di Ruminantia ma con questa serie di articoli vogliamo ospitare il metodo di lavoro dei principali costruttori e distributori di AMS e degli esperti del settore.
La scorsa settimana abbiamo pubblicato l’opinione di Bellucci Modena, concessionaria GEA. Con questa nuova pubblicazione riportiamo invece il punto di vista di Ermanno Melli della RUM&N Consulting.
Gestione nutrizionale in allevamenti con sistemi automatici di mungitura (AMS)
Introduzione
Dal punto di vista della gestione alimentare, la principale differenza tra i sistemi automatici di mungitura (Automatic Milking System: AMS) e quelli convenzionali è la somministrazione degli alimenti. Infatti, mentre col sistema convenzionale la razione viene fornita completamente in mangiatoia, con l’AMS una parte viene somministrata in mangiatoia (Partial Mixed Ration: PMR), e uno o più concentrati, generalmente in pellet, durante le visite al robot di mungitura.
Due sono gli obiettivi principali di un programma nutrizionale per le vacche munte con AMS:
- il primo, di carattere generale, è fornire una dieta che soddisfi i fabbisogni nutrizionali (mantenimento, produzione, ecc.). Tuttavia, l’AMS ha il vantaggio di poter spostare questo obiettivo dal gruppo (fornendo una dieta al box) alla singola vacca fornendo diete “personalizzate”. Pertanto, almeno a livello teorico, si potrebbe fornire una dieta finale diversa per ciascuna vacca all’interno dello stesso gruppo, regolando la quantità e la composizione del concentrato fornito attraverso il robot;
- il secondo obiettivo, specifico per AMS, è stimolare le vacche ad entrare volontariamente nell’AMS dispensando concentrato appunto durante le visite al robot.
Una delle ipotesi alla base dell’AMS è che all’aumentare della quantità di concentrato distribuita nel robot, aumentano il numero di visite volontarie e la produzione di latte. Per comprendere al meglio questo concetto, è necessario evidenziare che possono essere utilizzate due strategie nutrizionali, molto diverse fra loro, per aumentare la distribuzione di mangime nel robot:
- Decidere una quantità base di concentrato da fornire in AMS, tenendo in considerazione la densità energetica del PMR. In sostanza, la sfida è stabilire, a priori, la densità energetica del PMR e del mangime offerto in AMS. La maggior parte della ricerca in quest’area ha dimostrato che quando si confrontano diete isocaloriche, molto spesso la frequenza volontaria e la produzione di latte non sono influenzate dall’aumentate delle quantità di pellet offerto (Bach et al., 2007, Hare et al., 2018; Paddick et al., 2019). Va comunque segnalato uno studio più recente (Schwanke et al., 2019) dove la somministrazione di 6 vs 3 kg di pellet nell’AMS ha stimolato l’ingestione, aumentato le visite volontarie di 0,5 mungiture/giorno e, numericamente (ma non significativamente), ha aumentato la produzione di latte di 1,5 kg/giorno;
- Fornire concentrato nell’AMS in quantità crescenti, per aumentare la densità energetica della dieta finale. Sorprendentemente, i dati disponibili non supportano l’ipotesi che l’uso del concentrato in AMS per aumentare la densità di energia comporti un aumento importante delle visite volontarie o della produzione di latte, sia nei sistemi a flusso guidato (Menajovsky et al., 2018) che in quelli a flusso libero libero (Henricksen et al. al., 2018).
Ci sono diversi motivi per i quali le visite al robot e la produzione potrebbero non aumentare, tra cui:
- la quantità di concentrato programmato non viene realmente distribuito
- le vacche non ingeriscono tutto il concentrato distribuito
- l’ingestione di più concentrato riduce l’ingestione di PMR (tasso di sostituzione)
Inoltre, possono verificarsi anche effetti associativi causati da marcati cambiamenti nella composizione delle razioni. Ad esempio, gli algoritmi forniti dai costruttori di AMS influiscono su quando il concentrato viene fornito, sulla quantità erogata in un singolo pasto e sulla velocità di erogazione dello stesso. Tutti questi fattori influenzano la capacità dell’AMS di erogare il concentrato programmato. Inoltre, anche se le vacche possono ricevere un concentrato adeguato, all’aumentare della quantità programmata, spesso aumenta anche la quantità non consumata (Bach e Cabrera, 2017), determinando così una dieta realmente ingerita che differisce, anche notevolmente, da quella formulata e da quella prevista sulla base dei dati forniti dall’AMS. La distribuzione di grandi quantità di concentrato può anche aumentare la variabilità nel consumo individuale di mangime, effetto che, se combinato con il tasso di sostituzione (discusso di seguito), può portare a effetti associativi non sempre controllabili.
I sistemi di mungitura automatizzati forniscono la capacità di mungere le vacche individualmente oltre che di pianificare il piano alimentare in base al potenziale di produzione e alla fase dell’allattamento. Tuttavia, la mungitura personalizzata può portare non solo ad una mungitura più frequente e ad una maggiore produzione di latte all’inizio della lattazione, ma anche a più evidenti problemi di bilancio energetico negativo e disturbi metabolici. Tatone et al. (2017) hanno riferito che le mandrie AMS in Ontario (Canada) hanno evidenziato una maggiore prevalenza di chetosi sub-clinica (SCK 26%, misurando i livelli di corpi chetonici del latte) rispetto alle mandrie convenzionali (SCK 21%). Lo stesso studio ha riferito che le vacche multipare nelle mandrie AMS avevano maggiori probabilità di avere SCK rispetto alle mandrie convenzionali. Una maggiore prevalenza di SCK può essere il risultato di una maggiore frequenza di mungitura durante la prima fase della lattazione, di una inadeguata densità energetica del PMR o di inadeguata supplementazione attraverso il robot. In uno studio in campo, King et al. (2018) hanno riportato che lo sviluppo di SCK nelle vacche in aziende dotate di AMS era associato ad una maggiore produzione di latte rispetto alla quantità di mangime consumata nell’AMS, suggerendo che in quel momento si stava verificando un’integrazione inadeguata. Ciò fornisce l’indicazione che l’integrazione alimentare del robot per le vacche fresche può essere efficacemente basata sulla fase di lattazione (giorni di lattazione) piuttosto che sul livello di produzione.
Fornire più pellet nell’AMS non si traduce necessariamente in una maggiore ingestione di sostanza secca (DMI). Ad esempio, Hare et al. (2018) hanno riferito che all’aumento di 1 kg del pellet in AMS ingerito, si verificava una corrispondente diminuzione della DMI da PMR di 1,58 kg. Bach et al. (2007) hanno riportato una riduzione di 1,14 kg DMI da PMR e Paddick et al. (2019) hanno riportato che la DMI da PMR è diminuita di 0,97 kg per ogni kg di aumento del pellet ingerito nel robot. La riduzione della DMI da PMR con l’aumento dell’assunzione di pellet in AMS (tasso di sostituzione) dimostra che l’assunzione complessiva di nutrienti potrebbe non essere influenzata positivamente. Gli effetti di un maggior consumo di concentrato nell’AMS, e del conseguente tasso di sostituzione del PMR, possono variare anche a causa della densità energetica del PMR. Menajovsky et al. (2018) hanno riportato una riduzione di 0,78 e 0,89 kg/giorno di PMR per ogni kg di concentrato, a seconda della densità di energia PMR (bassa o alta). Al contrario, Schwanke et al. (2019) hanno riportato che per ogni aumento di 1 kg di pellet in AMS si è notata una riduzione di soli 0,63 kg di PMR. In quel caso, la maggiore fornitura di pellet ha portato ad una maggiore DMI totale il che, probabilmente, spiega il miglioramento, almeno numerico, della produzione di latte. Il tasso di sostituzione variabile individualmente, e attualmente non prevedibile a priori, può mettere in discussione la capacità di formulare diete per singole vacche nello stesso gruppo, dato che si ci può basare solo su fattori legati a quantità e tipologia di supplemento, mentre la composizione del PMR sarà uniforme e la sua ingestione individuale variabile anche in funzione del management applicato (sovraffollamento, numero di distribuzioni giornaliere del PMR, frequenza del riassetto della mangiatoia – push-up -, ecc.)
La gestione del PMR può essere un fattore chiave nel successo dell’AMS, soprattutto dovuto al fatto che l’attività di mungitura nell’AMS è in gran parte legata all’attività di alimentazione in mangiatoia (DeVries et al., 2011; Deming et al., 2013). La stimolazione di un adeguato comportamento alimentare nei confronti del PMR, attraverso frequenti distribuzioni della miscelata (2 o 3) e numerose spinte della miscelata verso le vacche (push-up), può risultare quindi decisiva per ottimizzare l’utilizzo di AMS. È interessante notare che in un recente studio in allevamenti con AMS, Siewert et al. (2018) hanno osservato che le aziende con push-up automatico producevano 352 kg in più di latte/robot e 4,9 kg in più per vacca rispetto alle aziende con riassetto manuale della mangiatoia. Questo effetto potrebbe non essere direttamente attribuibile all’uso di uno spingi-foraggio automatizzato, ma piuttosto al fatto che le aziende dotate di tali attrezzature avevano un push-up più regolare e, quindi, un accesso continuo alla miscelata, rispetto a quelle dove tale attività era svolta manualmente.
Nel complesso, la strategia di alimentazione negli allevamenti AMS è di estrema importanza e deve tener conto della fase di lattazione e del livello di produzione. È ormai riconosciuto che essa avrà un impatto sui livelli di consumo di PMR, quindi è necessario tenerne conto quando si formulano i piani alimentari. Infine, incoraggiare l’ingestione di PMR con un’adeguata densità energetica, aiuterà a garantire un’elevata ingestione totale oltre che un’adeguata attività di mungitura.
Applicazione di un’efficace strategia alimentare con NDS
Alla luce delle ricerche menzionate e delle considerazioni riportate, è stato sviluppato all’interno della piattaforma NDS, e perfezionato nel corso degli anni, uno strumento definito NDS Milk Step Feeding. La funzionalità è stata progettata per la definizione delle quantità di concentrati da fornire separatamente in associazione a PMR. Esso può risultare utile in tutte le situazioni in cui è prevista la distribuzione di concentrati in aggiunta ad una razione di base e, in particolare, nella formulazione di piani alimentari in aziende dotate di AMS. Nella figura di seguito, un esempio di programmazione alimentare con la funzionalità NDS Milk Step Feeding.
Un programma alimentare ottimale in presenza di AMS dovrebbe contemplare un approccio integrato che coinvolga un ottimale utilizzo dei foraggi disponibili, la produzione e la qualità del latte, l’efficienza dei robot e la salute della mandria. Quindi, anche l’operatività del NDS Milk Step Feeding si basa su una strategia messa a punto grazie ad una collaborazione con l’Università del Saskatchewan (Canada; Menajovsky et al., 2018), i cui punti salienti sono riportati di seguito.
Strategia di formulazione per AMS utilizzando NDS
- Formulare il PMR per la produzione media di latte del box, includendo una quantità minima di pellet distribuita dal robot, in grado di garantire un adeguato stimolo a visitare la stazione per le vacche di produzione media.
- Questa quantità minima potrebbe essere intorno a 1.2-1.6 kg al giorno ingerita attraverso il robot e non inclusa nel PMR.
- In questo modo, per gli animali a produzione media, in termini di latte consentito sia da energia che da proteine metabolizzabili (ME ed MP), la dieta dovrebbe soddisfare:
- PMR senza quantità minima di concentrato = 94-96% dei fabbisogni.
- PMR con aggiunta della quantità minima suggerita = 99-101% dei fabbisogni.
- Impostare la quantità massima di pellet distribuita nel robot in base al numero massimo di visite osservate per le vacche ad alta produzione, considerando i seguenti vincoli:
- Dimensione massima del pasto di 1,5-1.6 kg/pasto (ad es. vacca alta con frequenza di mungitura di 4,7 = 7,5 kg al giorno).
- No carry-over, ovvero il mangime eventualmente non consumato nella giornata non sarà distribuito il giorno successivo in aggiunta alla quantità giornaliera impostata.
- I vincoli sopra menzionati dovrebbero essere impostati per tutte le vacche, indipendentemente dalla produzione di latte e dal numero reale di visite al robot. Inoltre, le quantità di concentrati suggerite, indicano le quantità che le vacche dovrebbero realmente ingerire e non le quantità da programmare, che potrebbe essere superiori in base alle reali quantità rifiutate.
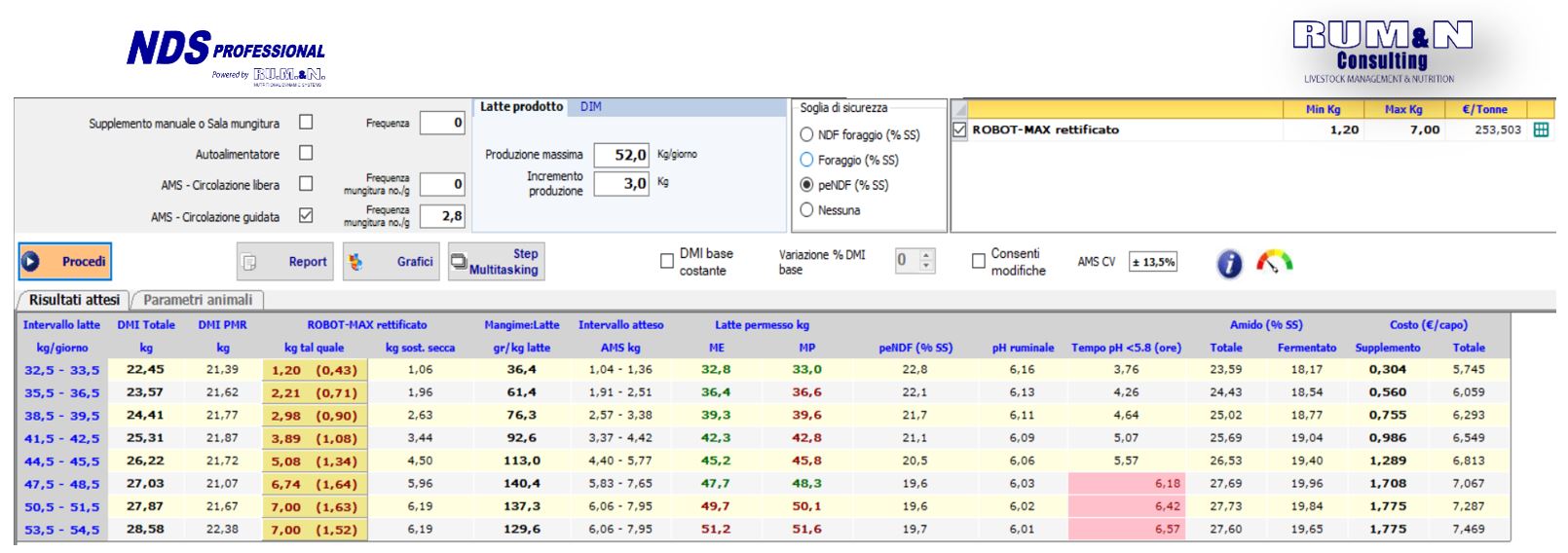
Figura 1: L’esempio mostra, nelle prime colonne, la DMI totale e di PMR con la quantità di pellet da somministrare suggerita. Inoltre, fornisce una previsione di produzione lattea in funzione di ME ed MP, ed una serie di parametri stimati per monitorare il benessere ruminale dell’animale ed i costi associati per livello produttivo.
Conclusioni
Il successo e la redditività legati all’applicazione dei sistemi automatici di mungitura sono strettamente dipendenti dall’applicazione di una corretta strategia alimentare che dovrebbe tenere in considerazioni le seguenti implicazioni:
- L’aumento della fornitura di concentrato nell’AMS probabilmente non migliorerà la produzione del latte o i suoi componenti.
- La PMR ad alta densità energetica può consentire un aumento della DMI senza influire negativamente sulle visite volontarie.
- La fornitura di moderate quantità di concentrati attraverso il robot può consentire una maggiore flessibilità del tipo di mangime utilizzato.
- Garantire una maggiore consistenza fra il concentrato programmato e quello consumato (minori residui).
- L’offerta di elevate quantità di concentrati nel robot potrebbe stimolare più frequenti visite al robot, ma aumenta la variabilità nell’assunzione di concentrato rispetto al programmato, vanificando, in buona misura, il concetto di “Precision Feeding”.




